Ein Programm auf den EV3 übertragen
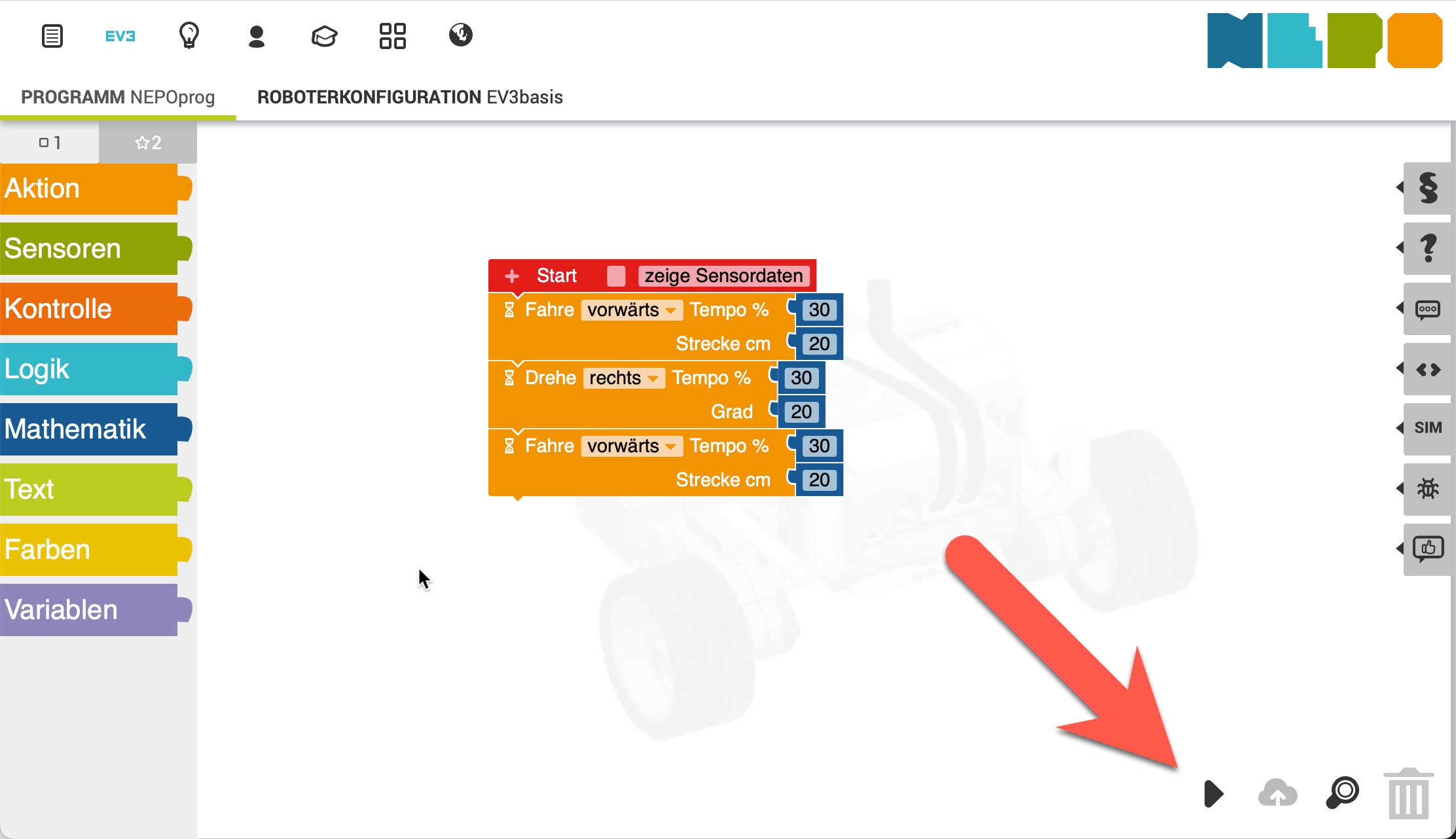
Nun soll das Programm auf dem echten Roboter ausgeführt werden. Das setzt voraus, dass du den Roboter über das USB-Kabel am Computer angeschlossen hast. Dann wird das Programm auf den Roboter geladen. Dazu klicken wir auf den Start-Button:
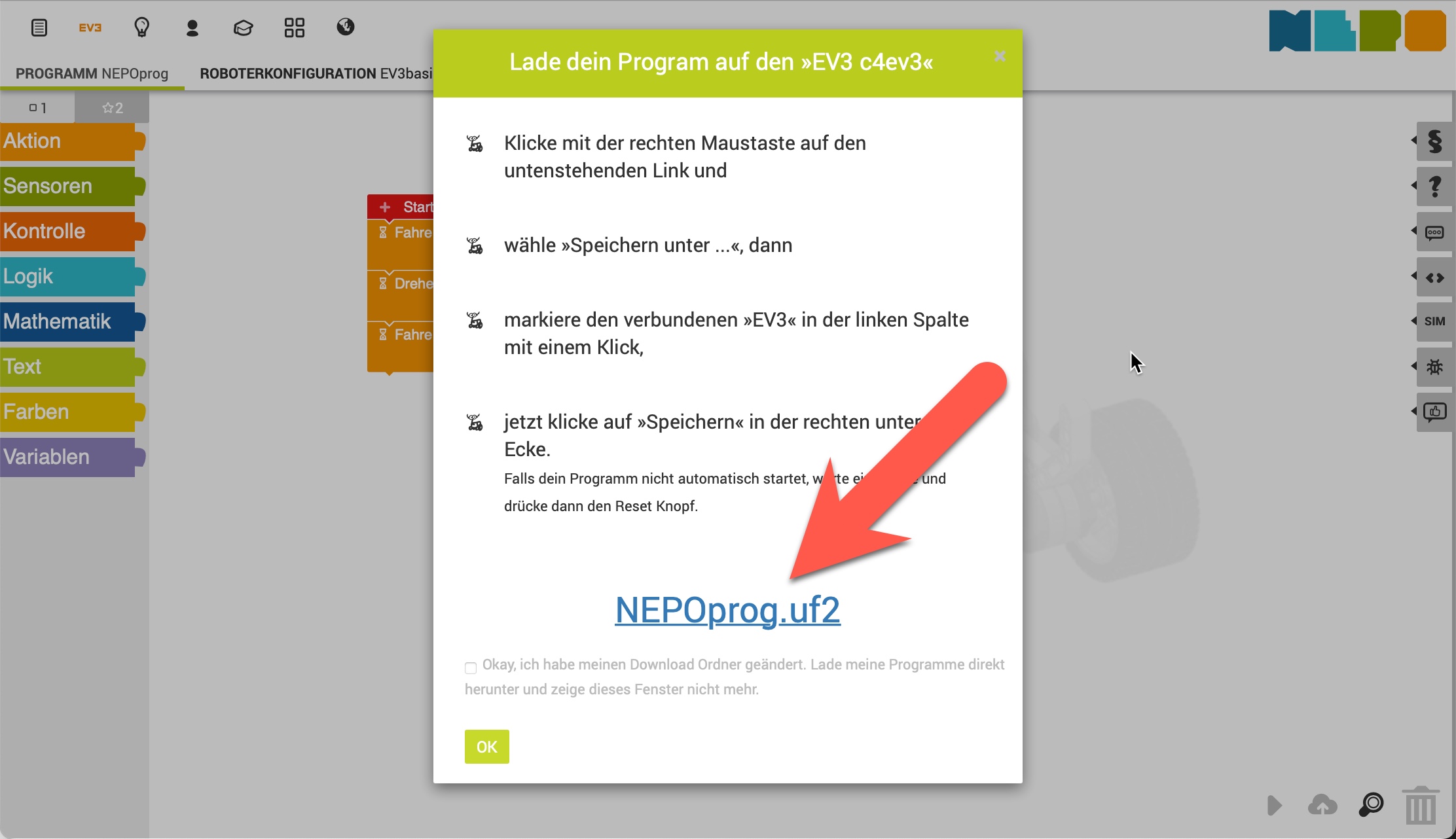
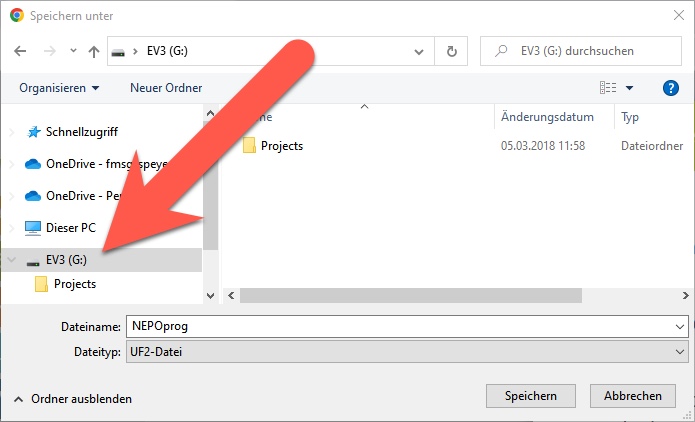
Anschließend klicken wir mit der rechten Maustaste auf den entsprechenden Link und speichern die Datei wie dort beschrieben auf dem EV3. Je nach Browser kann der Menüeintrag, den du wählen musst, unterschiedlich benannt sein, z.B. "Link speichern unter", "Ziel speichern als" oder "Verknüpfte Datei laden unter". Wenn der Roboter ein paar Sekunden danach zwei mal piepst, wurde das Programm erfolgreich auf den Roboter geladen.
Programm starten
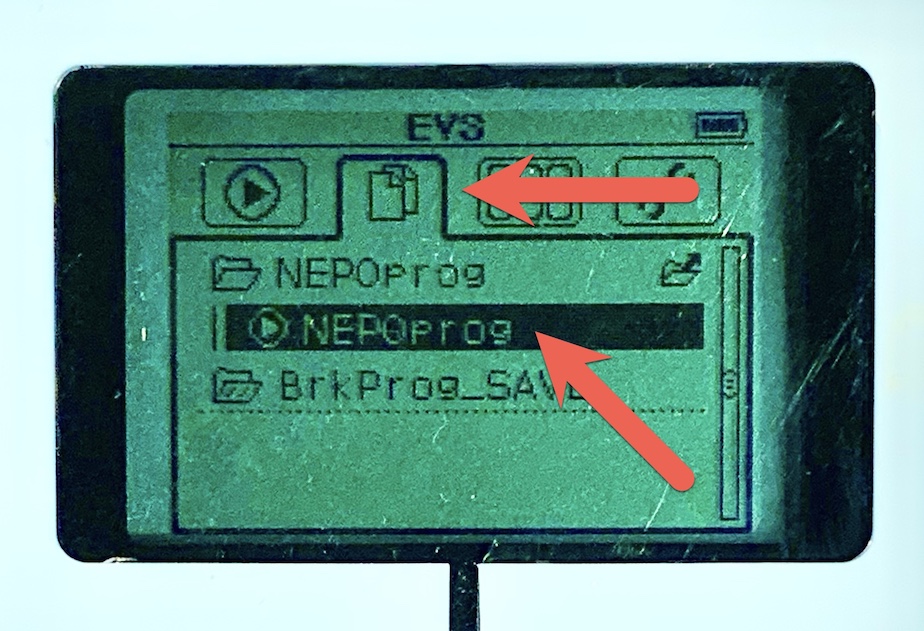
Der EV3 zeigt im linken Tab eine Liste der Programme, die du als letztes ausgeführt hast. Wenn du dein Programm das erste mal heruntergeladen hast, kann es dort natürlich noch nicht erscheinen:
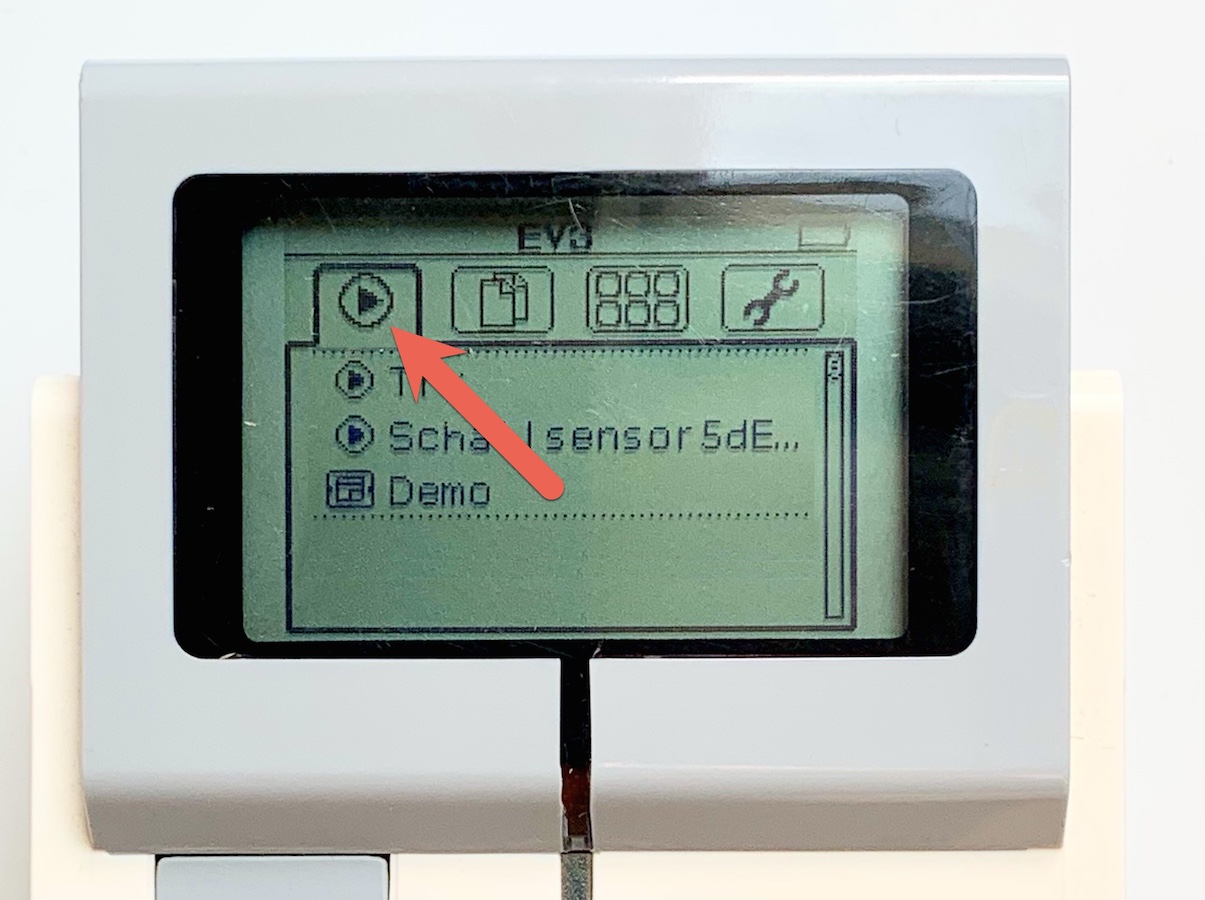
Du musst mit der Rechts-Taste zum nächsten Tab wechseln und dort dein Programm auswählen. Standardmäßig heißt das Programm "NEPOprog".
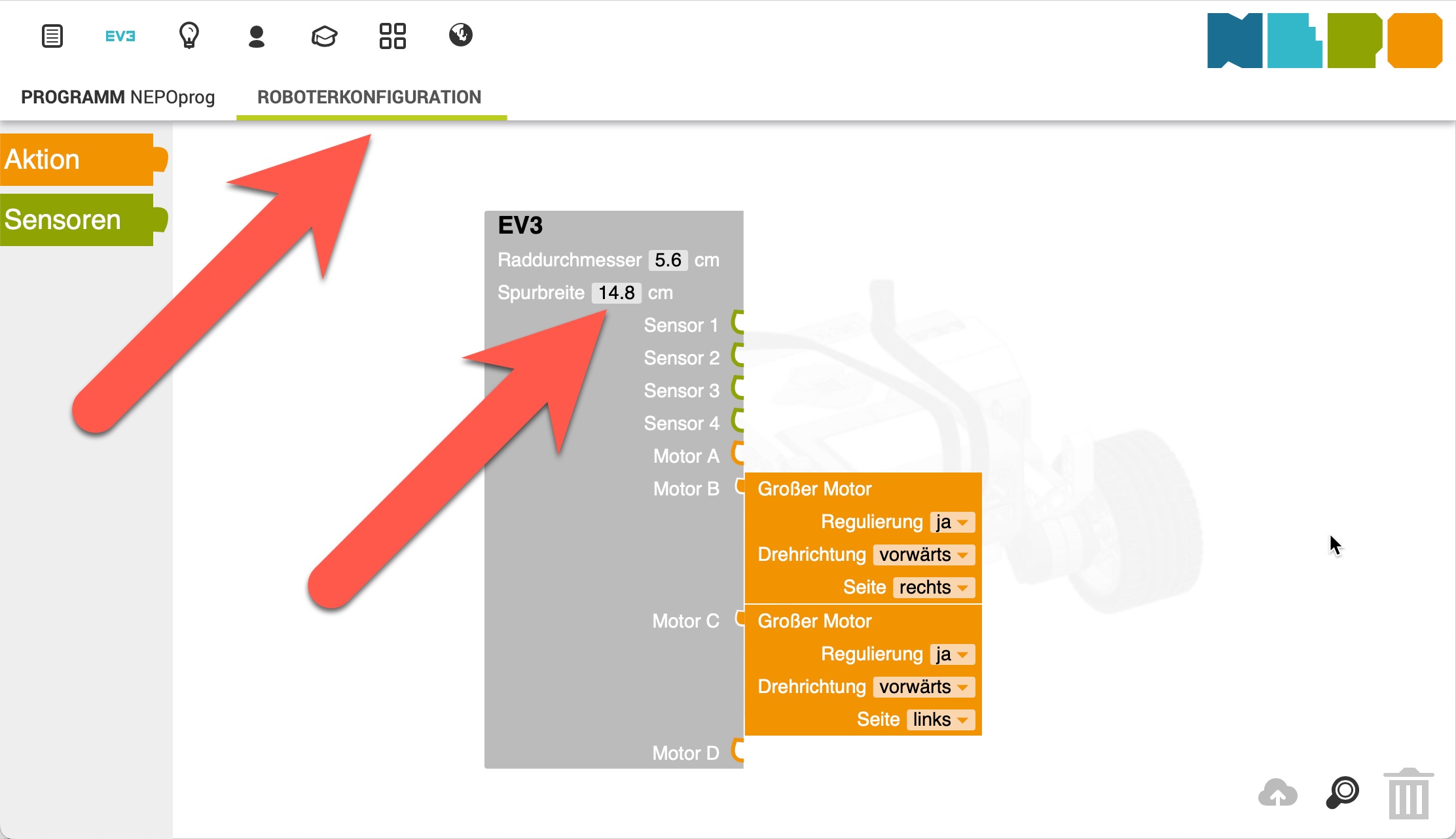
Wenn du das Programm gestartet hast, ist dir möglicherweise aufgefallen, dass der Drehwinkel des Roboters nicht stimmt. Abweichungen kann es z.B. aufgrund des Untergrundes immer geben, du musst aber auch die Konfiguration des Roboters an das von dir gebaute Modell anpassen:
Aufgabe 1
Probiere das alles selbst aus.
